Introduction
Ros2Robots.com provides working robots for your school, university projects or just for the pleasure of adding a new and relevant skill. We offer Arduino robots (Luna) and the more advanced Ros2Robots(Mars). Our robots have been heavily researched to ensure at all the components work together in balanced and reliable way. The materials used in our robots can be used and reused throughout our range. That’s from Luna to Mars. n our commercial mowing robots robots that are 64 inches long and 40 inches wide.
Why did we start this business? We found when learning ros and ros2 that we needed a real physical model. We found many ros2 models on the internet. After playing with a few they turned out to be difficult to change any of the components. There was no space to upgrade the robot. Worst of all it was difficult to get Ros2 working. The skill level to get this all to work was significant. So what we set out to do was Provide a simple robot Luna to learn the basics and then to upgrade to Mars. If you purchase out kit we guarentee that our ros2kit will work straight out of the box.
You can greatly expand the number and type of sensors to use on these robots robot. You can add sonar, lidar, gps, IMU and various cameras to improve the accuracy of the robot. In addition, you can easily replace lower grade sensors with better sensors to make your robot more accurate.
We have found over the years that the real difficulty of building and operating a mobile robot is getting the software to work with the hardware as it should. There are so many small details that you need to get right before the robot will work. So it is really comforting knowing that your robot will work and that you do not need to spend hours and hours chasing hard to find bugs.. This is expecially true with Ros2Robots. Integrating PID control, Kalman filtering is normally very difficult to implement. It is made easy when we provide the correct code for your project.
Other advantages include, reusing the robot build materials from one model to another. These models also have larger wheels and ground clearance than other robots so that they can be used either indoor or outdoor. We not only provide all of the code to get the model working, but we also include a number of tasks so you can learn how the models code works. You can also upload your and others code as well to change the functionality of your robot
We do not sell the construction hardware; however, we give you a detailed bill of materials and recommended supplier list plus a detailed assembly manual. We supply the code loaded onto the motor driver and or the motor controller. It is 100% correctly configured.
We provide details for two different robot projects. Projects 1 includes Models 1 and 2. They are basically very similar as they both use Arduino microprocessors to control the robot, but Model-2 is larger than Model-1. Model-1 is a indoor model where as model 2 is both indoor and outdoor. This models can use either an Arduino Uno or Arduino Mega. The Model-3 is a much more complex robt as it uses the Ross Operating System (Ros2) to control the motion og the robot. For this project we supply a Raspberry Pi with SD card so that ROS learning curve is greatly reduced. We also supply the code loaded on an Arduino Uno that works with the motor drivee
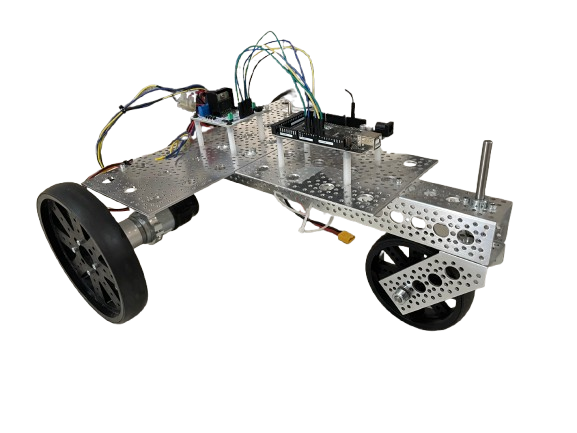
Model-1
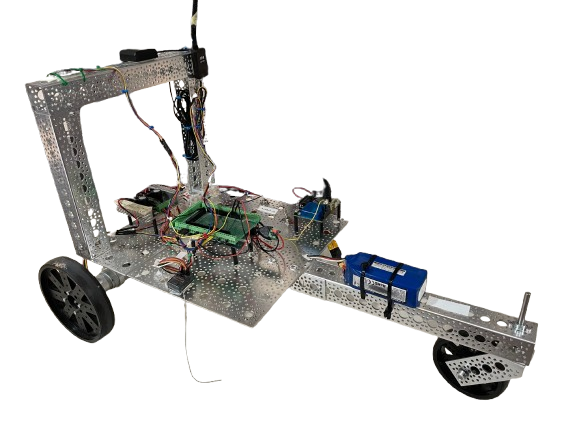
Model-2
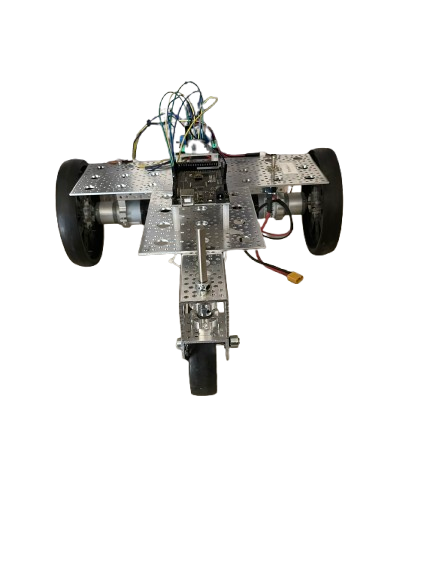
Model-3
Model 1 Is for entry level robot enthusiasts that want a scalable robot from beginner to expert. From simple to complex. Like all MKR models the parts from model 1 can be used by other more complex MKR robots.
Model-1 Specification
Dimensions
Usage.
Motor Driver
Motor Controller.
Drive Motors.
Encoders.
Battery.
More to follow
X Y Z
Indoor
L298N
None
116 rpm
2030 ticks
11.1 volts
Experiments that can be run of the Model-1.
The robot drives itself forward for 5 seconds then backwards for 5 second
The robot drives itself at different speeds and durations 50, 100, 150, 200
The robot drives itself in a box shaped patten
Drive the robot in a box shaped pattern using wheel encoders
Drive the Robot and use 2 sonar sensors to avoid objects
Drive the robot by using a RC transmitter/receiver.
Drive the robot using Bluetooth controller
Experiments that can be run of the Model-1.
The robot drives itself forward for 5 seconds then backwards for 5 second
The robot drives itself at different speeds and durations 50, 100, 150, 200
The robot drives itself in a box shaped patten
Drive the robot in a box shaped pattern using wheel encoders
Drive the Robot and use 2 sonar sensors to avoid objects
Drive the robot by using a RC transmitter/receiver.
Drive the robot using Bluetooth controller
Model 2 is for intermediate level robot enthusiasts
Model-1 Specification
Dimensions
Usage.
Motor Driver
Motor Controller.
Drive Motors.
Encoders.
Battery.
More to follow
X Y Z
Indoor-outdoor
L298N or Sabertooth
Arduino Mega
116 rpm
2030 ticks
11.1 volts
Model 2 Experiments.
Manual and Autonomous control
Drive robot by using a radio transmitter and receiver
In autonomous mode drive in a straight line by using PID on encoders
Drive to a heading by adding an IMU
Drive to several waypoints by adding a GPS
Will add more here
Model 3 is for advanced level robot enthusiasts. This is a ROS2 robot model.
Model-1 Specification
Dimensions
Usage.
Motor Driver
Motor Controller.
Drive Motors.
Encoders.
Battery.
More to follow
X Y Z
Indoor/outdoor
Sabertooth 2×32
RaspberryPi 4
116 rpm
2030 ticks
11.1 volts
Model 3 Experiments.
This is a full ROS 2 model. With a choice of motor drivers and lidar
SLAM. The model can be driven around an area to make a map
Navigation After making a map you can load the navigation code and drive around the may autonomously
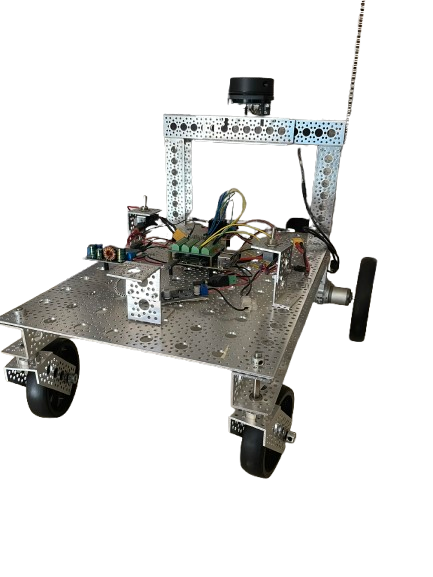
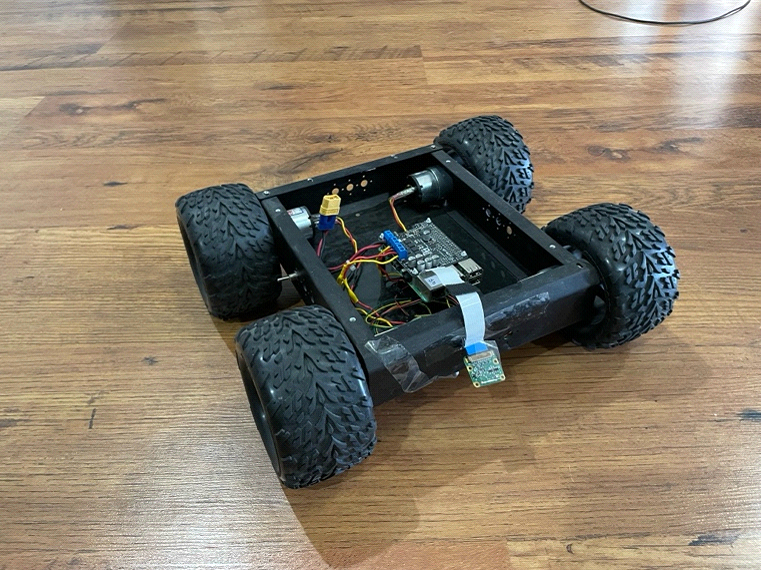
Model 4 and 4 A is for intermediate to advanced level robot enthusiasts. It consists of a Raspberry Pi 3 or higher 4 wheel drive robot that can be driven by a joy stick over the internet. With onboard camera it can be driven around your house as a security robot.
Model-4 Specification
Dimensions
Usage.
Drive.
Motor Driver
Motor Controller.
Drive Motors.
Encoders.
Battery.
X Y Z
Indoor
4 wheeled drive
Polulu for RPI
RaspberryPi 4
116 rpm
2030 ticks
11.1 volts
Model 4 Experiments.
Model-4 is a model that is driven via the wifi in your house. It uses a joystick plugged into raspberry pi to steer the robot. The Pololu motor driver in the robot is plugged directly into raspberry pi. Commands from the joystick are sent to the robot by wifi which inturn drives the robot. It can also use a pi camera to see where it is going
Model 4A uses tank tracks rather than wheels.